Culture exchange program has made it possible for Kruno Jošt and Ricardo Palmieri to present installation CultureRobot at festival HAIP 08.
CultureRobot is participatory interactive installation that raises awareness of social and political sphere that is affecting autonomous cultural sphere in Ljubljana.
“The HAIP Festival puts on display multimedia art forms resulting from creative use of open technologies and the freedom of artistic expressions in open-source media. It presents works of the young, promising artists and creative engineers on international level, who specialize in top-notch, open-standards-supported arts and multimedia art practices. The festival features individuals and groups with a critical approach towards the technologies that surround us and shape our everyday environment.” (from http://www.haip.cc/)
From 27th to 31th of October final preparations of the installation has been made. Steps were:
1. Making of the Robots (recycled material for small robots)
2. Tracking the Robots (Open CV with hacked webcam for infrared detection)
3. Filtering the Robots data (positioning in PD)
4. Image of the Map (interactive)
This are the tools and recycled material used to make a robot

First we had to test electronical circuit that will power electro motors.

This is how the elements are supposed to be glued on the body of the robot – the old DVD.

To help stabilizing the wheels we used old metal plates. We glued wheels on metal plates. Wheels are made with rubber material found in pipe repair store.




Everything was glued on the top of the CD and circuit was connected based on the scheme.

Robot antenas that will on contact shut down one of the motors thus making robot turn in one direction were glued (later soldered) to electronic switches.

We fitted caps made from plastic bottles trying to prevent robots to hook each other with antennas.


This is the movie of robot movement
To help us work we visited local TV and radio repair shop and collected old remote controls that were disassembled and led diodes were taken out.


Led diodes are glued on the top of each robot.

Old web cam was hacked by inserting found developed slide film. This will filter out all unwanted infrared light and show only led diode light on the back of our robots.



Pure Data (open source software for multimedia interactivity) patch for detecting robot movements looks like this.

Collaborative map was developed during past months with artist and cultural workers from Ljubljana. Map is representing cultural points in center of Ljubljana. This map will continue to aggregate data on suggestions of the HAIP festival visitors.
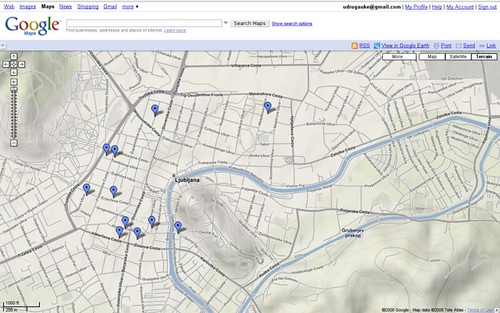
This is PD patch that calibrates specific location on the map with the coordinates of the robot. It will detect when robot is on the coordinate thus creating visuals on the projected screen.

Activities of the robots are seen on the map by changing colors.
